
自动焊接机械臂制作详情
发布时间 : 2020-04-27
自动焊接机械臂的制作详解:
第1步:设计
起初我看到很多专业项目由于其复杂性而无法实施。
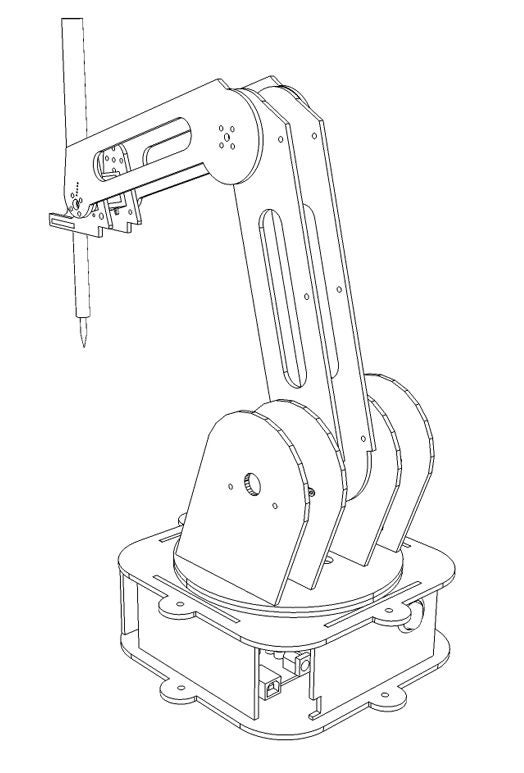
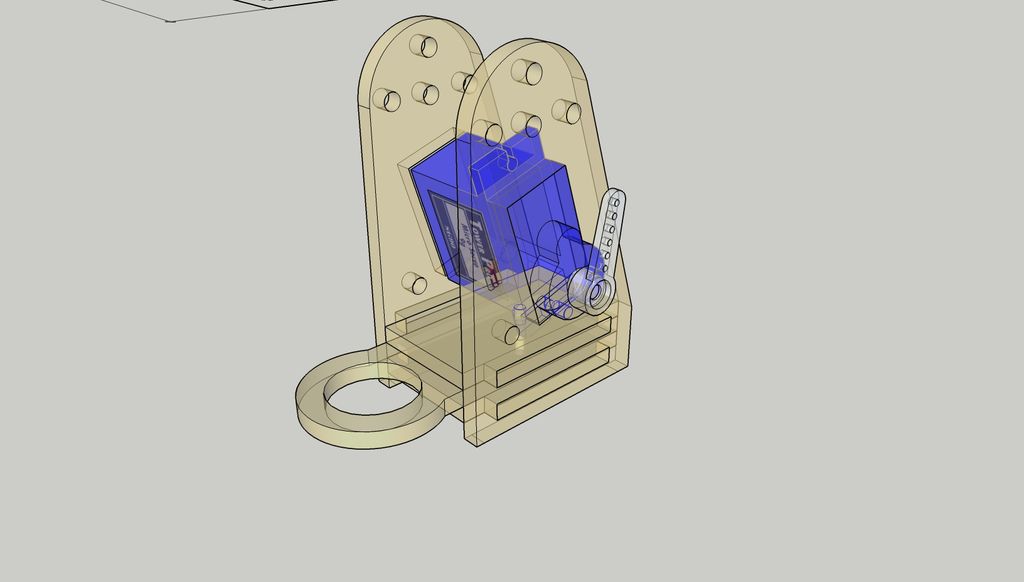
然后我决定让自己的产品受到其他项目的启发,所以我使用了Google Sketch up 2017 pro。每个部件都按照特定顺序彼此相邻组装,如下图所示。
在组装之前,我必须测试零件并选择合适的烙铁,这是通过绘制虚拟精加工项目作为我的指导。
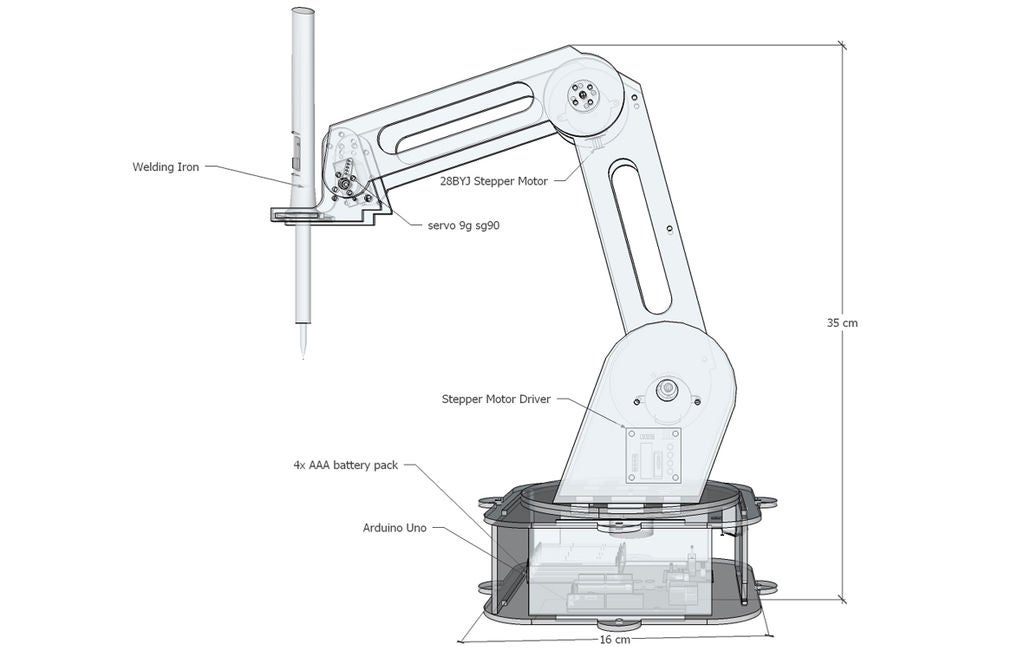
这些图纸显示了实际的精加工寿命尺寸形状以及每个零件的正确尺寸,以选择合适的烙铁。
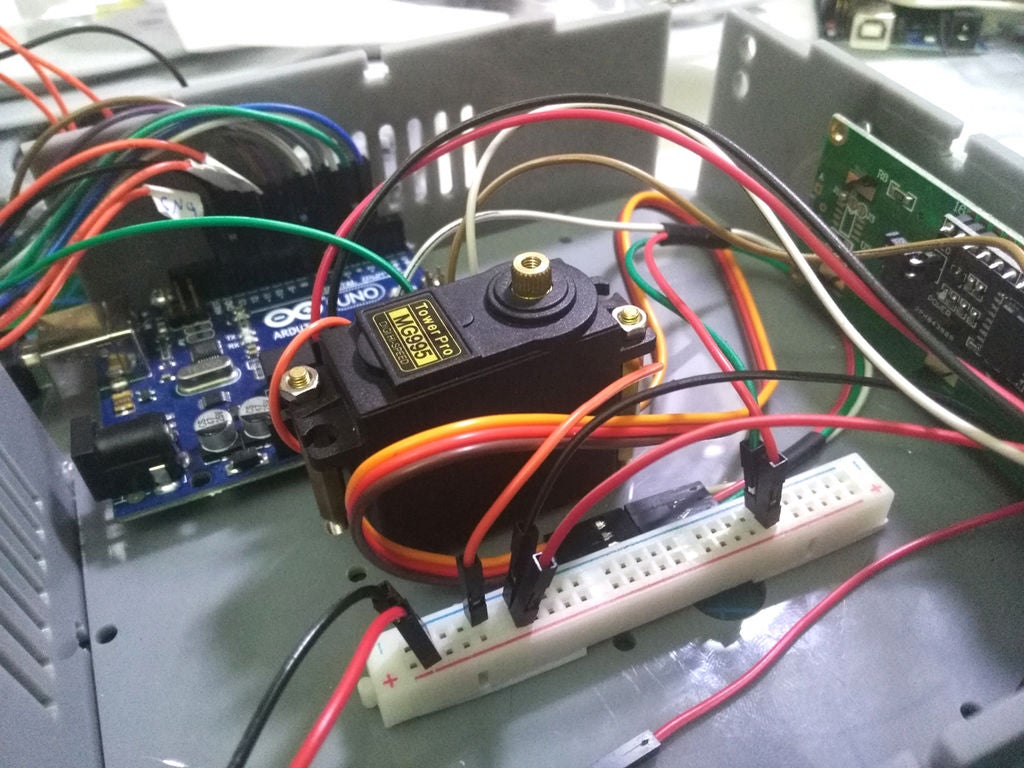
第2步:电子零件










1.Stepper Motor 28BYJ-48带驱动模块ULN2003
2.Arduino Uno R3
3.MG-90S微型金属齿轮伺服电机
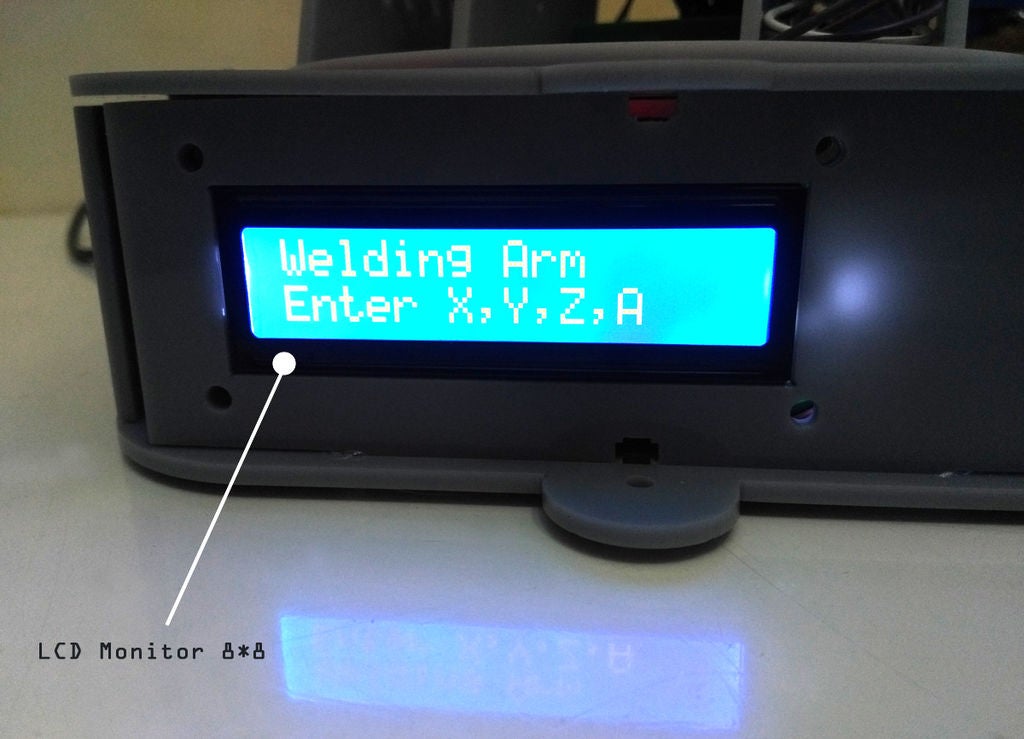
4.I2C串行LCD 1602模块
5.Breadboard
6.跳线
7.Step down Module
8。微伺服电机金属齿轮
步骤3:操作和安装


在工作期间,我遇到了一些障碍,我们必须宣布它。
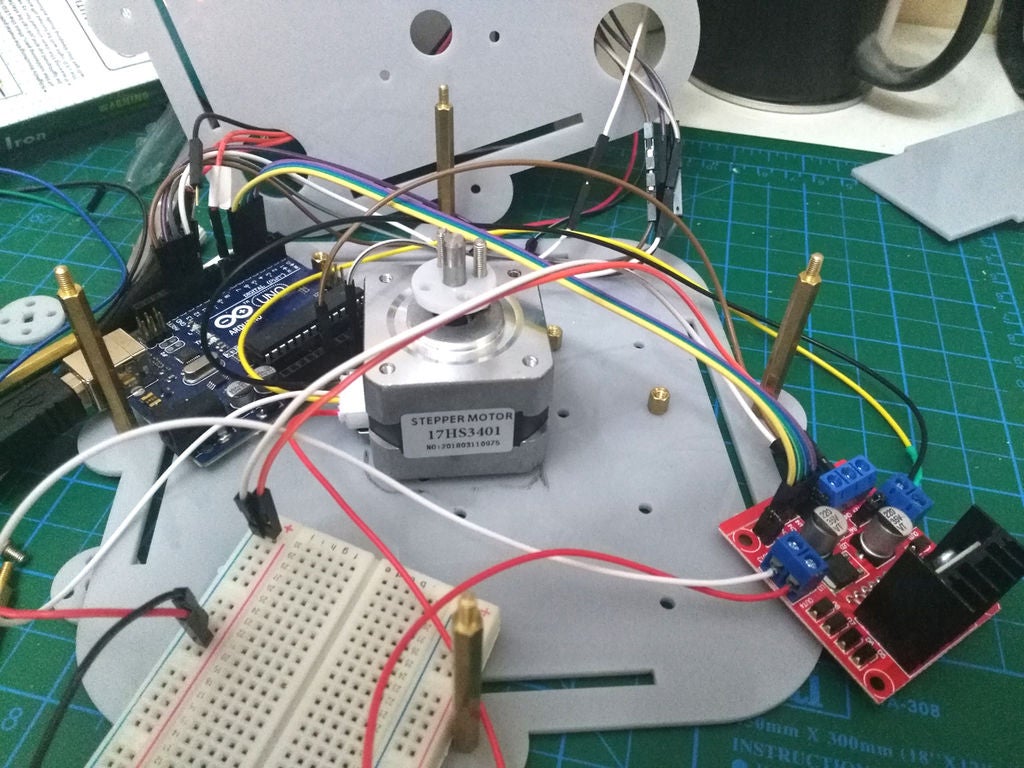
1。 手臂太重而无法通过小型步进电机固定,我们在下一版本或激光切割打印中将其固定。
2. 因为模型由塑料材料制成,旋转底座的摩擦力很高,运动也不平滑。
第一个解决方案是买一个能够承受重量和摩擦力的更大的步进电机,我们重新设计底座以适应更大的步进电机。
实际上问题仍然存在,更大的电机没有固定它,这是因为我们旁边的两个塑料表面之间的摩擦力无法调整锅百分比。最大旋转位置不是驾驶员可以提供的最大电流。您必须使用制造商显示的技术,在这里您可以在转动电位器时测量电压。
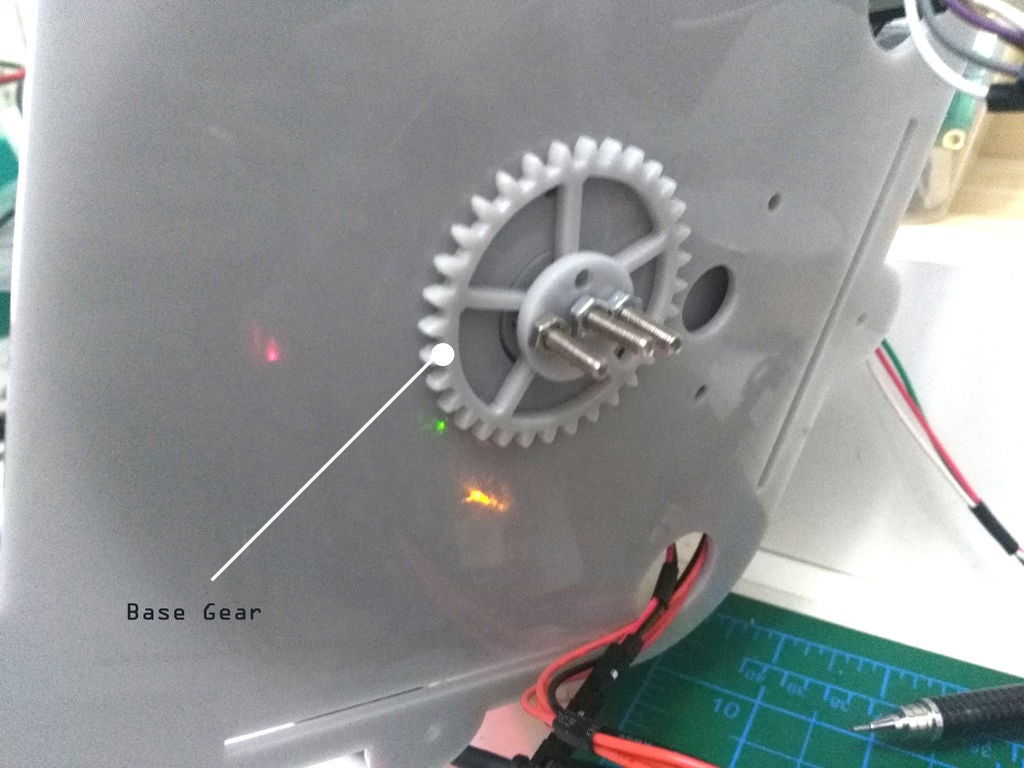
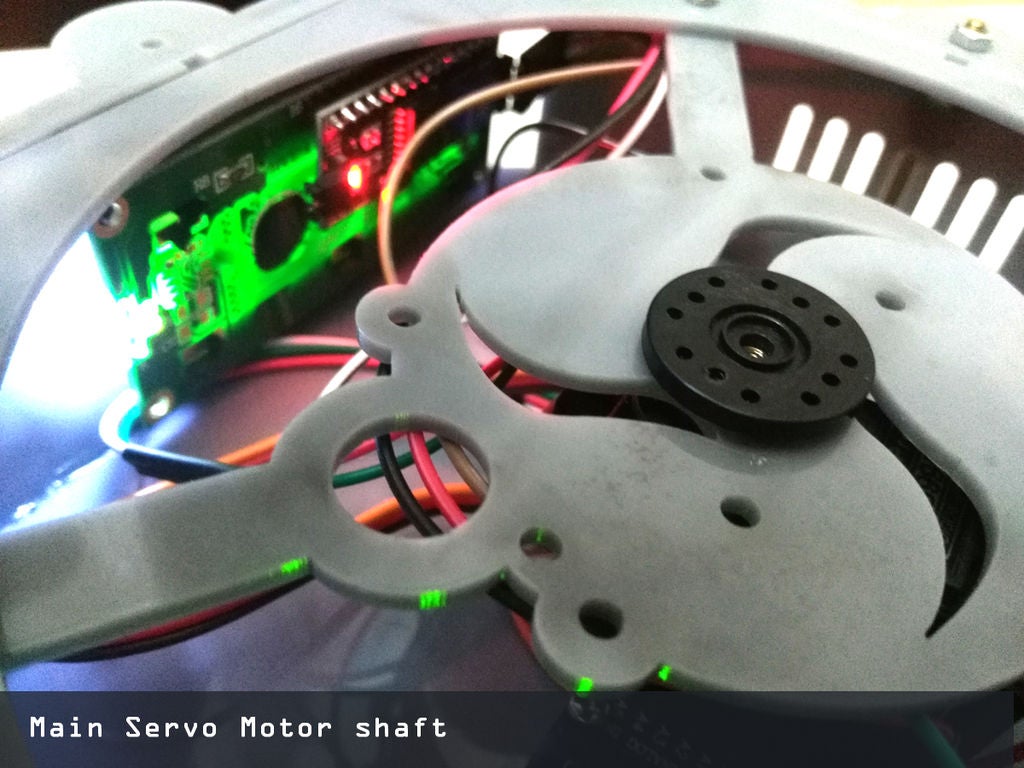
然后我完全改变了底座设计并安装了带齿轮机构的金属齿轮的伺服电机。
3。 电压
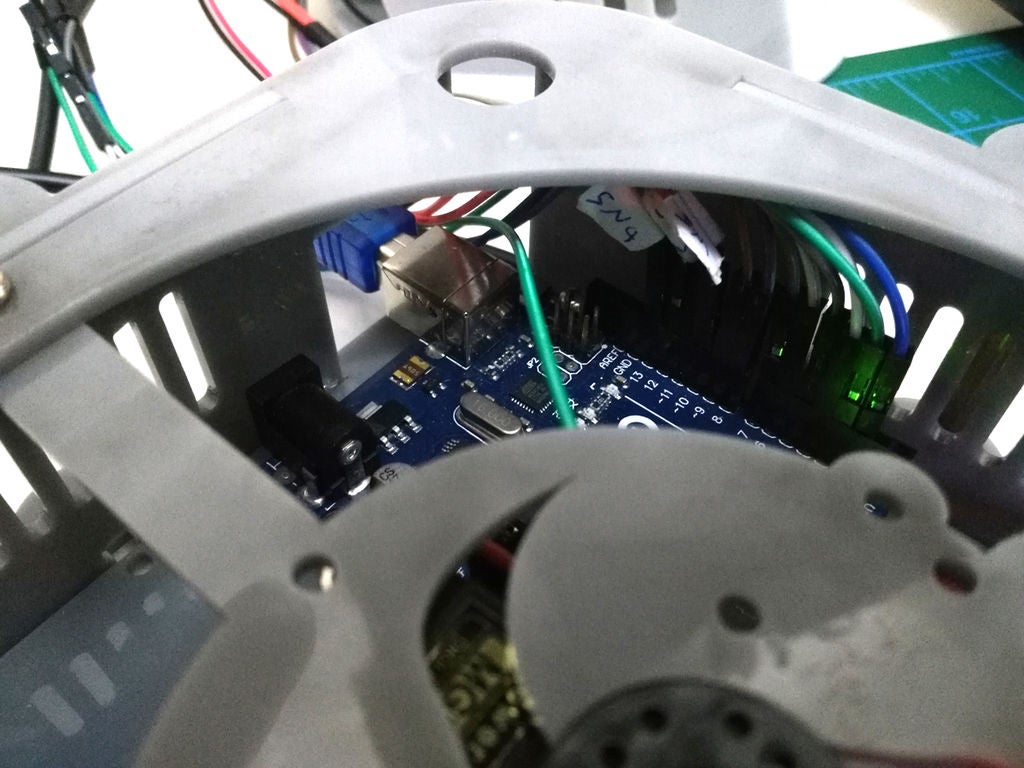
Arduino板可以通过直流电源插孔(7 - 12V),USB连接器(5V)或电路板的VIN引脚(7-12V)供电)。通过5V或3.3V引脚提供电压绕过稳压器,我们决定购买支持5伏电压或任何电源的特殊USB电缆。
所以步进电机和其他组件正常工作只需5伏电压就可以确保零件免受任何问题的影响我们将降压模块固定下来。
降压模块是一个降压转换器(降压转换器),它是一个直流到直流电源转换器降压(同时升压电流)从其输入(电源)到其输出(负载),同时保持稳定或电压。
步骤4:修改
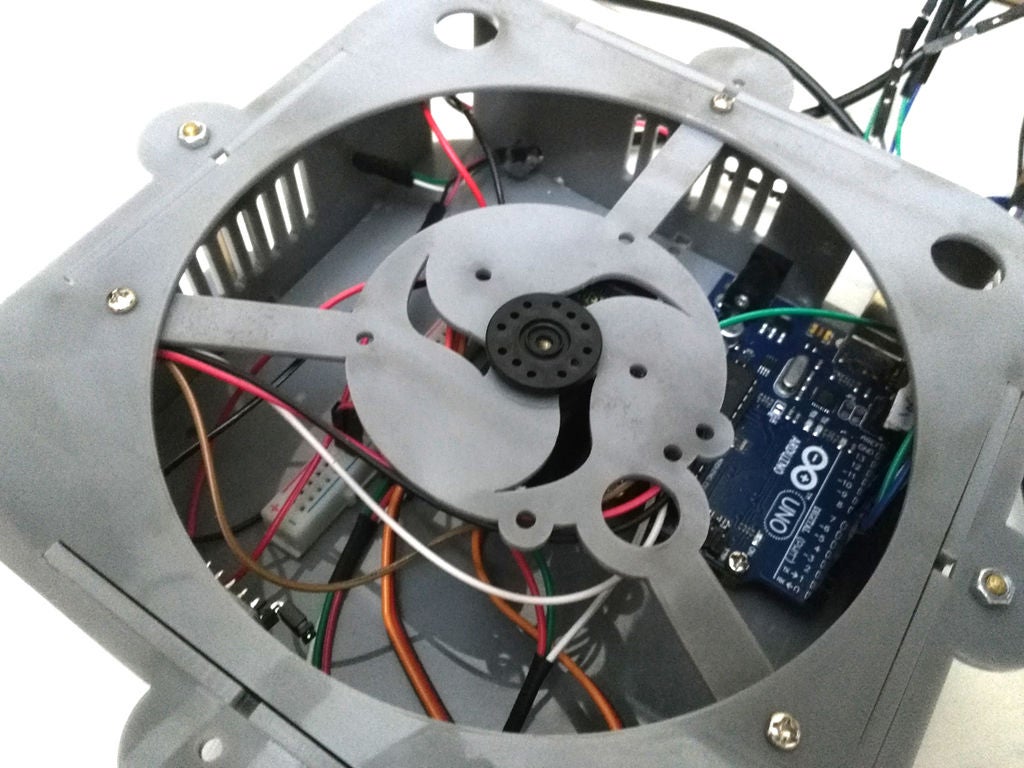

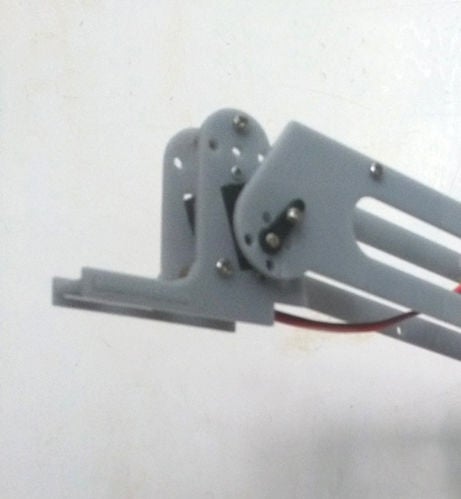
经过一些修改后,我们通过减少手臂改变了模型的设计如图所示,伺服电机齿轮的尺寸和制作合适的孔。
在测试伺服电机时,成功地将重量正确旋转180度,因为它的高扭矩意味着机构能够承受更重的负载。伺服机构可以输出多大的转动力取决于设计因素 - 电源电压,轴速等。
同样使用I2c很好,因为它只使用两个引脚,你可以将多个i2c设备放在同一个两个针脚。例如,您可以在两个引脚上拥有多达8个LCD背包+ LCD!坏消息是你必须使用‘硬件’i2c引脚。
第5步:焊铁座或夹持器

夹具
使用金属齿轮伺服电机固定,以承受烙铁的重量。
servo.attach(9, 1000, 2000);
servo.write (constrain (angle, 10, 160)) ;
起初我们遇到了一个障碍,那就是电机振动和振动,直到我们发现一个棘手的代码来限制天使。
因为不是所有的伺服都有一个完整的180度
所以我们编写了一个测试来确定机械限制的位置。使用servo.write Microseconds而不是servo.write我更喜欢这个,因为它允许你使用1000-2000作为基本范围。许多伺服系统将支持600到2400之外的范围。
因此,我们尝试了不同的值,看看你在哪里获得了告诉你已达到极限的嗡嗡声。然后在你写作时只能保持在这些限度内。你可以在使用servo.attach(pin,min,max)时设置这些限制。
找到真正的移动范围,并确保代码不会试图超过终点,约束()Arduino功能对此非常有用。
以下是您可以购买USB焊铁的链接:
Mini 5V DC 8W USB电源焊接铁笔+触摸开关支架
第6步:编码


Arduino使用库
环境可以通过使用库进行扩展,就像大多数编程平台一样。库提供了用于草图的额外功能,例如,使用硬件或操纵数据。在草图中使用库。
下一条:焊接机器人应用现状及发展趋势
